Next Tutorial: Installation
Motivation
Ignition Physics (ign-physics) is a library component in Ignition, a set of libraries designed to rapidly develop robot and simulation applications. The main goal of the library is to provide an abstraction layer to various physics engines, which gives end-users the ability to use multiple physics engines with minimal change to their application code. Users can request for physics engines that support a set of features and the plugin loading mechanism loads only the engines that implement the requested features. Besides, a user-selected physics engine can be integrated into the existing code-base by writing a compatible plugin interface, which enables Ignition Physics extensibility and modularity.
Overview
For a big picture of the Ignition Physics operation in Ignition ecosystem, see the abstract diagram below:
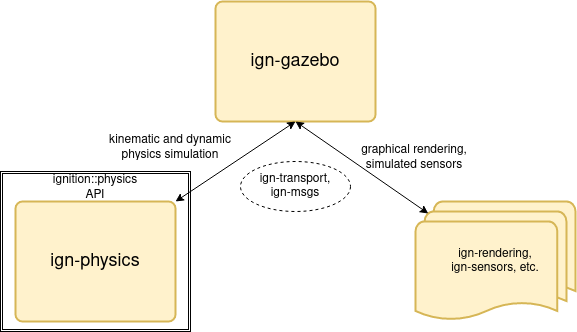
In general, ign-gazebo is the main simulation library, in which its functionalities are powered by many component libraries. For example, its graphical drawing is supported by ign-rendering or simulated sensors that are defined and implemented in ign-sensors. In particular, this library ign-physics provides an abstract interface to physics engines, which simulates dynamic transformations and interactions of objects in ign-gazebo. The libraries are connected by C++ code.
Ignition Physics uses a plugin architecture where each physics engine is implemented as a plugin that can be loaded at runtime. To enable users the ability to choose between physics engines, Ignition Physics introduces four keys elements:
- Entity: the base class, which abstracts all proxy objects, which contains minimal descriptive data (e.g. a unique identifier, a reference-counter, etc.) pointing the corresponding implemented objects.
- FeaturePolicy: the policy class, which provides metadata to features about their simulation engine specifications. FeaturePolicy supports customizing Ignition Physics' APIs by the number of dimensions (2D or 3D) and also the floating-point scalar type (float or double).
- Feature: defines the concept used to encode the capabilities of a physics engine.
- FeatureList: aggregates a list of features.
Depending on which external physics engine is used (e.g. DART, TPE, Bullet, etc.), the internal interface to the physics engine might be different. However, the API provided by Ignition Physics will be unchanged between different physics engines.
Supported physics engines
For a list of supported physics engines and their descriptions, please refer to Understanding the Physics Plugin
Development timeline
Features logs
Ignition Physics 1.x
- Initial release
- Define base concepts: Entity, FeaturePolicy, Feature and FeatureList.
- Add features for
dartsimphysics engines (more detail in Understanding the Physics Plugin). - Add RequestFeatures API for casting the features of an entity to a new feature set when possible.
- Enforce joint effort limit in
dartsim-plugin.
Ignition Physics 2.x
- Support SDFormat 1.7 frame semantics.
- Support compiling against DART 6.9.
- Trivial Physics Engine (TPE)- partial implementation
- Add features for TPE physics engines (more detail in Understanding the Physics Plugin).
- Extend contact data with force, normal, and penetration depth.
- Add Base and EntityManagement to
tpeplugin
Ignition Physics 3.x
Future roadmap
Ignition Physics evolves closely with the Ignition ecosystem. For a broader overview, please visit Ignition's roadmap.