Overview
This tutorial goes through the process of designing a maritime model to be used in Gazebo. Our basic model will be a turtle. First, we'll start simple and will add more features as we progress in the tutorials.
Related tutorials
https://gazebosim.org/docs/harmonic/building_robot
Design a basic SDF model
Create a workspace to store your brand new model named my_turtle.
Each model must have a model.config file in the model's root directory that contains meta information about the model. Create a model.config file:
You can find a description of the allowed elements in model.config in this Gazebo Classic tutorial.
Create a model.sdf file that contains the Simulator Description Format of the model. You can find more information on the SDF website.
The model.sdf file contains the necessary tags to instantiate a very minimal model named my_turtle using SDF version 1.6.
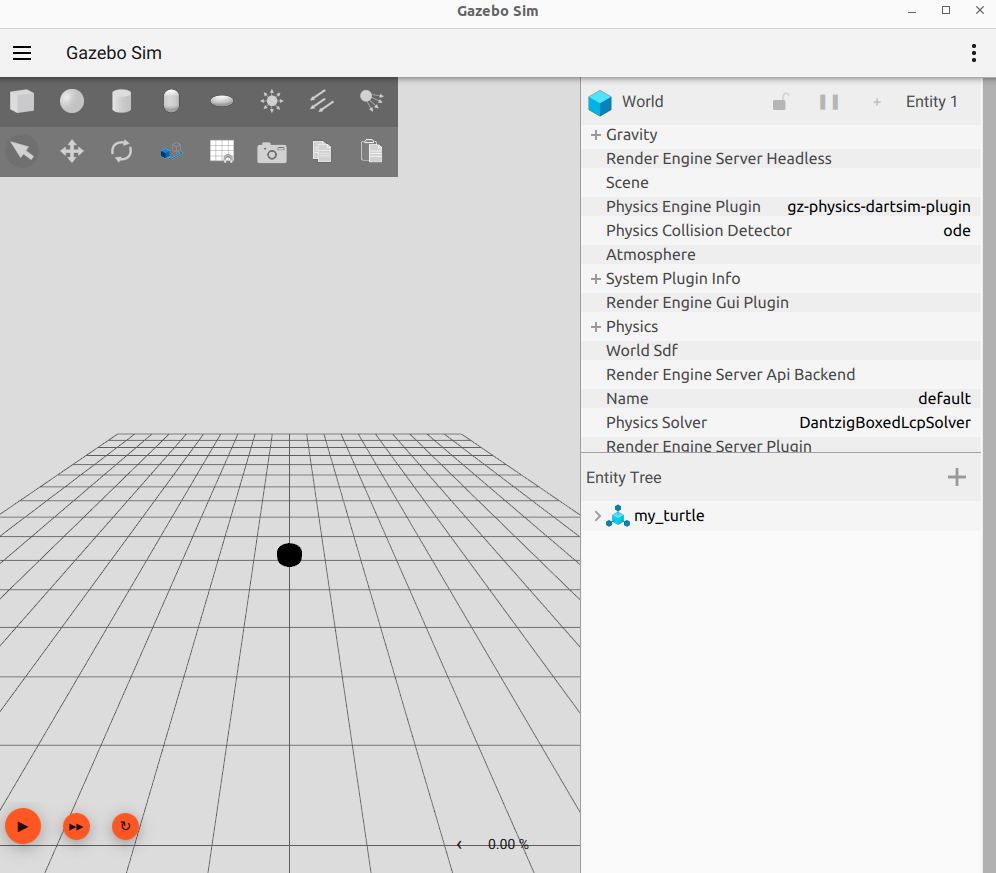
Load your model in Gazebo
Launch Gazebo and load our model:
You should see your model visualized as a cylinder and the Gazebo Entity Tree should capture its structure.