This tutorial showcases how to enable real-time global illumination in Gazebo.
About global illumination
Global illumination (GI) techniques account for illumination from indirect light reflections. When GI is enabled, objects not only receive direct light from light sources, but also from indirect light bouncing off of other surfaces, ensuring nice reflections and a more natural appearance.
Gazebo supports two GI methods through the Ogre2 rendering engine, Voxel Cone Tracing (VCT) and Cascaded Image Voxel Cone Tracing (CI VCT).
Voxel Cone Tracing
A scene rendered with VCT is reliable and good quality, and thus is the best choice for most scenes.
VCT parameters include:
- Resolution
- Octant count
- Bounce count
- High quality
- Anisotropic
- Thin wall counter
- Conserve memory
- Debug visualization mode
Cascaded Image Voxel Cone Tracing
Compared to VCT, a scene rendered with CI VCT is slightly lower quality, but the scene can be re-voxelized every frame, so it’s much faster when dealing with very large scenes. However, it is more memory-intensive than VCT.
CI VCT parameters include:
- Bounce count
- High quality
- Anisotropic
- Debug visualization mode
- Cascade
- Resolution
- Octant count
- Thin wall counter
- Area half size
Enabling global illumination in Gazebo
During simulation, the GUI and the camera sensor view are two different scenes. The GUI scene is rendered on the frontend client process, and the camera sensor scene is rendered on the backend server process. Thus, GI can be enabled on either or both of these processes.
Note: GI solutions require hardware that uses OpenGL4.
Note: CI VCT must be run with Vulkan as the render engine API backend.
How to enable global illumination for the GUI
GI can be enabled for the GUI through a GUI plugin. Both VCT and CI VCT are supported for the GUI.
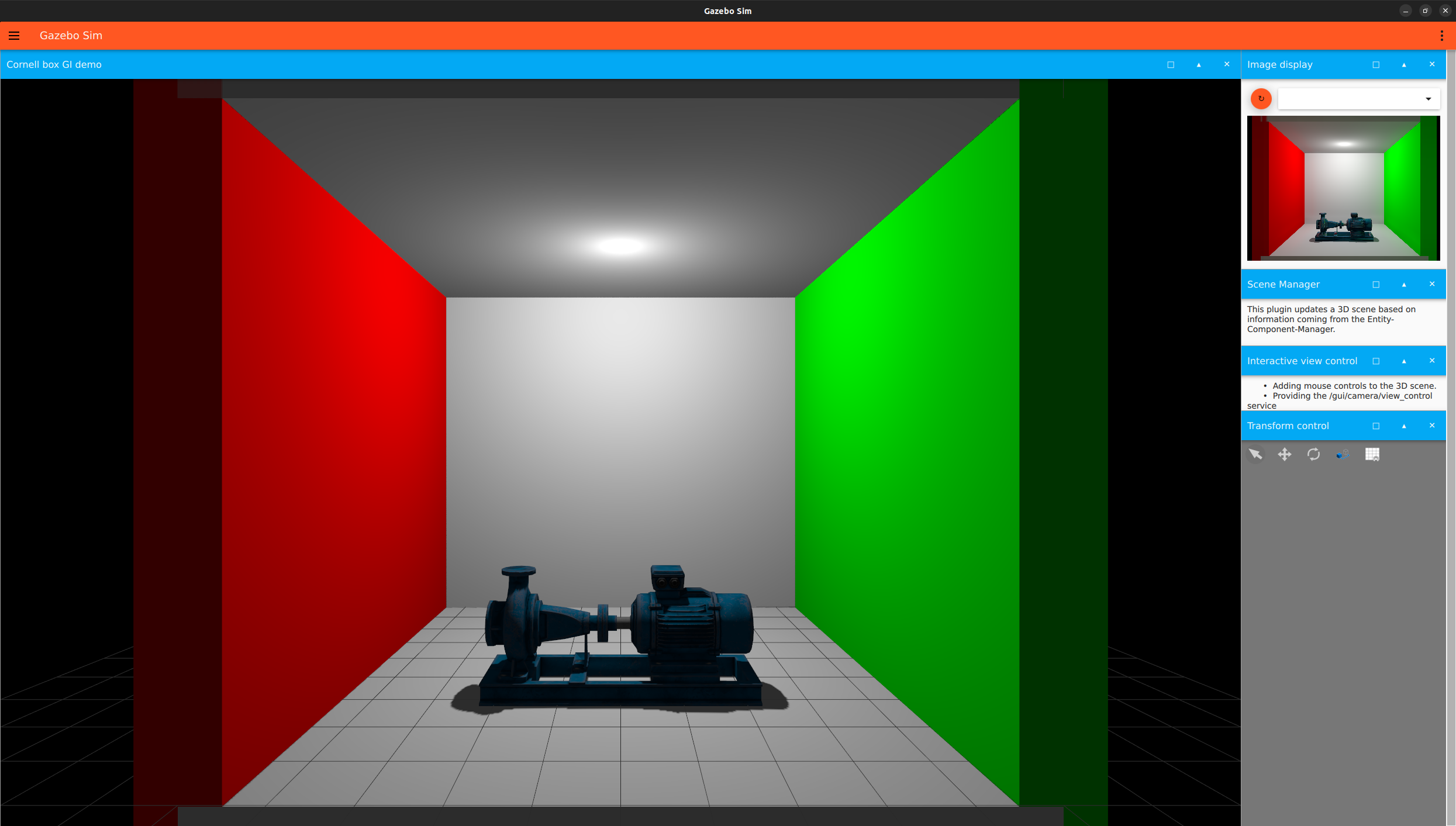
Example usage for VCT
1) Open the global_illumination.sdf world with
gz sim global_illumination.sdf
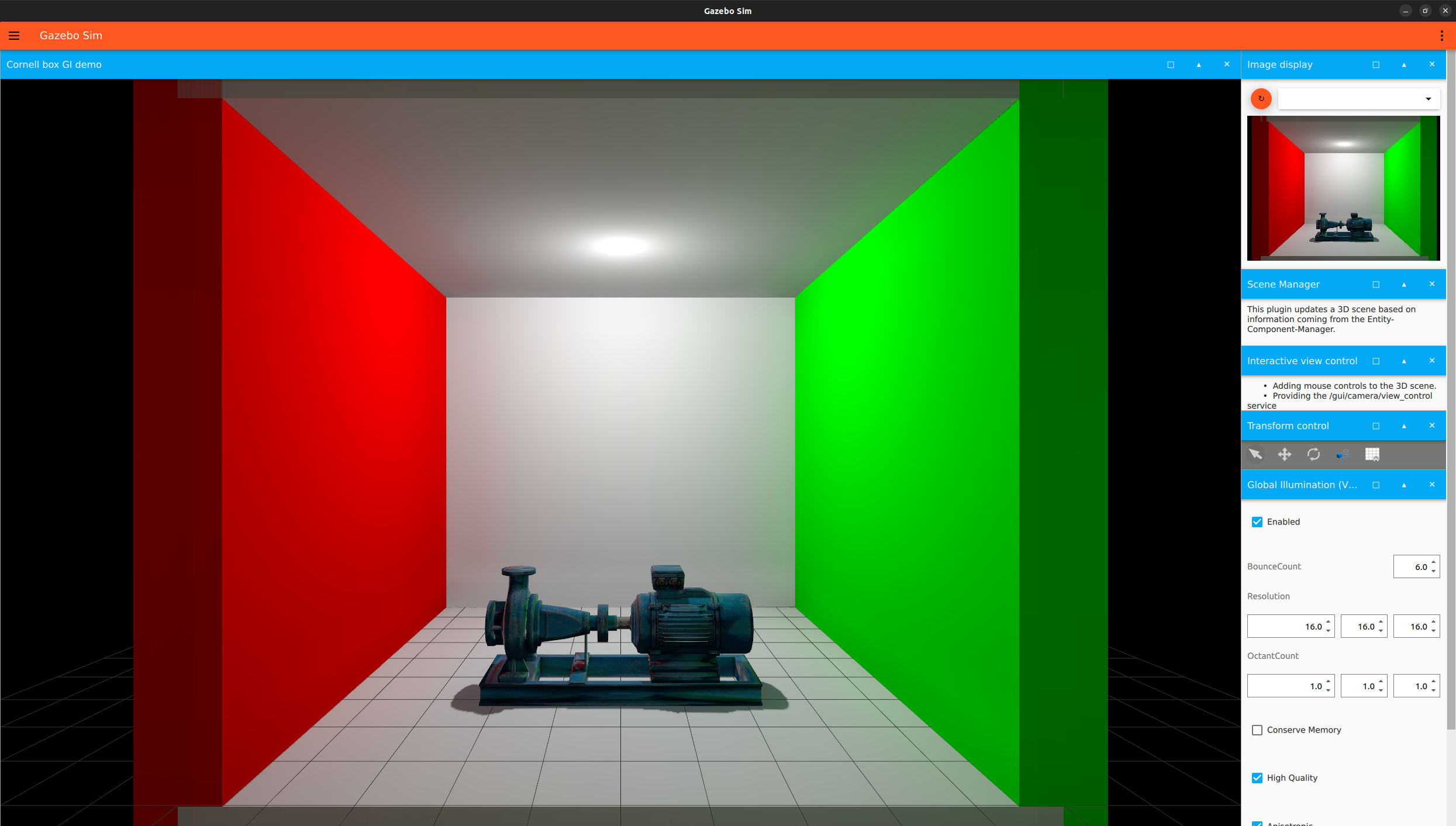
2) From the plugin dropdown, select the Global Illumination Vct plugin.
3) On the card, check the Enabled button to enable GI and change the parameter values as desired.
Example usage for CI VCT
1) Open the global_illumination.sdf world using Vulkan with
gz sim global_illumination.sdf --render-engine-api-backend vulkan
2) From the plugin dropdown, select the Global Illumination Ci Vct plugin.
3) On the card, check the Enabled button to enable GI and change the parameter values as desired.
How to enable global illumination for the sensor
GI can be enabled for sensors through the <global_illumination> element in the Sensors System plugin. VCT is supported for the sensor.
Example usage with VCT
We will demonstrate how to enable VCT for the sensor with the SDF file below. (The finished SDF file can be viewed here.)
1) Save the below in an SDF file named gi_demo.sdf:
<?xml version="1.0" ?>
<sdf version="1.10">
<world name="gi_demo">
<plugin
filename="gz-sim-physics-system"
name="gz::sim::systems::Physics">
</plugin>
<plugin
filename="gz-sim-sensors-system"
name="gz::sim::systems::Sensors">
<render_engine>ogre2</render_engine>
</plugin>
<plugin
filename="gz-sim-user-commands-system"
name="gz::sim::systems::UserCommands">
</plugin>
<plugin
filename="gz-sim-scene-broadcaster-system"
name="gz::sim::systems::SceneBroadcaster">
</plugin>
<scene>
<ambient>0.4 0.4 0.4</ambient>
<background>0 0 0</background>
</scene>
<gui>
<plugin filename="MinimalScene" name="3D View">
<gz-gui>
<title>Cornell box GI demo</title>
<property type="bool" key="showTitleBar">true</property>
<property type="string" key="state">docked</property>
</gz-gui>
<engine>ogre2</engine>
<camera_pose>-12 0 4 0 0 0</camera_pose>
</plugin>
<plugin filename="ImageDisplay" name="Image Display">
<topic>camera</topic>
</plugin>
<plugin filename="GzSceneManager" name="Scene Manager"/>
<plugin filename="InteractiveViewControl" name="Interactive view control"/>
<plugin filename="TransformControl" name="Transform control">
<gz-gui>
<property key="resizable" type="bool">false</property>
<property key="x" type="double">0</property>
<property key="y" type="double">50</property>
<property key="width" type="double">250</property>
<property key="height" type="double">50</property>
<property key="state" type="string">docked</property>
<property key="showTitleBar" type="bool">true</property>
<property key="cardBackground" type="string">#777777</property>
</gz-gui>
</plugin>
<plugin filename="SelectEntities" name="Select Entities">
<gz-gui>
<property key="resizable" type="bool">false</property>
<property key="width" type="double">5</property>
<property key="height" type="double">5</property>
<property key="state" type="string">floating</property>
<property key="showTitleBar" type="bool">false</property>
</gz-gui>
</plugin>
</gui>
<light type="point" name="ceiling_light">
<pose>0 0 7.5 0 0 0</pose>
<diffuse>1 1 1 1</diffuse>
<specular>0.0 0.0 0.0 0</specular>
<attenuation>
<range>50</range>
<linear>0</linear>
<constant>0</constant>
<quadratic>0.02</quadratic>
</attenuation>
<cast_shadows>true</cast_shadows>
<visualize>false</visualize>
<intensity>1.0</intensity>
</light>
<model name="wall_left">
<pose>0 5 4 0 0 0</pose>
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>10 1 10</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>10 1 10</size>
</box>
</geometry>
<material>
<ambient>1 0 0 1</ambient>
<diffuse>1 0 0 1</diffuse>
<specular>1 0 0 1</specular>
</material>
</visual>
</link>
</model>
<model name="wall_right">
<pose>0 -5 4 0 0 0</pose>
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>10 1 10</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>10 1 10</size>
</box>
</geometry>
<material>
<ambient>0 1 0 1</ambient>
<diffuse>0 1 0 1</diffuse>
<specular>0 1 0 1</specular>
</material>
</visual>
</link>
</model>
<model name="floor">
<pose>0 0 -0.5 0 0 0</pose>
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>10 10 1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>10 10 1</size>
</box>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<model name="ceiling">
<pose>0 0 8.5 0 0 0</pose>
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>10 10 1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>10 10 1</size>
</box>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<model name="wall_back">
<pose>4.5 0 4 0 0 0</pose>
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>1 10 10</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>1 10 10</size>
</box>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<model name="pump">
<pose>-1.5 0 0 0 0 0</pose>
<link name="pump_link">
<collision name="pump_collision">
<geometry>
<mesh>
<uri>https://fuel.gazebosim.org/1.0/openrobotics/models/pump/1/files/meshes/pump.dae</uri>
<scale>3 3 3</scale>
</mesh>
</geometry>
</collision>
<visual name="pump_visual">
<geometry>
<mesh>
<uri>https://fuel.gazebosim.org/1.0/openrobotics/models/pump/1/files/meshes/pump.dae</uri>
<scale>3 3 3</scale>
</mesh>
</geometry>
<material>
<diffuse>1.0 1.0 1.0</diffuse>
<specular>1.0 1.0 1.0</specular>
<pbr>
<metal>
<albedo_map>https://fuel.gazebosim.org/1.0/openrobotics/models/pump/1/files/materials/textures/pump_albedo.png</albedo_map>
<roughness_map>https://fuel.gazebosim.org/1.0/openrobotics/models/pump/1/files/materials/textures/pump_roughness.png</roughness_map>
<metalness_map>https://fuel.gazebosim.org/1.0/openrobotics/models/pump/1/files/materials/textures/pump_metallic.png</metalness_map>
<normal_map>https://fuel.gazebosim.org/1.0/openrobotics/models/pump/1/files/materials/textures/pump_normal.png</normal_map>
</metal>
</pbr>
</material>
</visual>
</link>
</model>
<model name="camera">
<pose>-15 0 4 0 0.0 0</pose>
<static>true</static>
<link name="link">
<pose>0.05 0.05 0.05 0 0 0</pose>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.1 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.1 0.1</size>
</box>
</geometry>
</visual>
<sensor name="camera" type="camera">
<camera>
<horizontal_fov>1.047</horizontal_fov>
<image>
<width>2560</width>
<height>1920</height>
</image>
<clip>
<near>0.1</near>
<far>100</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>30</update_rate>
<visualize>true</visualize>
<topic>camera</topic>
</sensor>
</link>
</model>
</world>
</sdf>
2) Add the <global_illumination> element to the Sensors System plugin.
<global_illumination type="vct">
<enabled>true</enabled>
<resolution>16 16 16</resolution>
<octant_count>1 1 1</octant_count>
<bounce_count>6</bounce_count>
<high_quality>true</high_quality>
<anisotropic>true</anisotropic>
<thin_wall_counter>1.0</thin_wall_counter>
<conserve_memory>false</conserve_memory>
<debug_vis_mode>none</debug_vis_mode>
</global_illumination>
The parameters can be changed from the default values.
3) Open the gi_demo.sdf world with