This tutorial will explain how to use the LogicalAudioSensor system plugin in Gazebo.
The logical audio sensor plugin allows for the usage of logical audio sources and microphones in a simulation environment. At the end of each simulation step, microphones check if audio was detected by any of the sources in the world. The logical audio plugin does not play actual audio to a device like speakers, but rather simulates audio being played in environments to see if audio could theoretically be heard at a certain location or not.
Setup
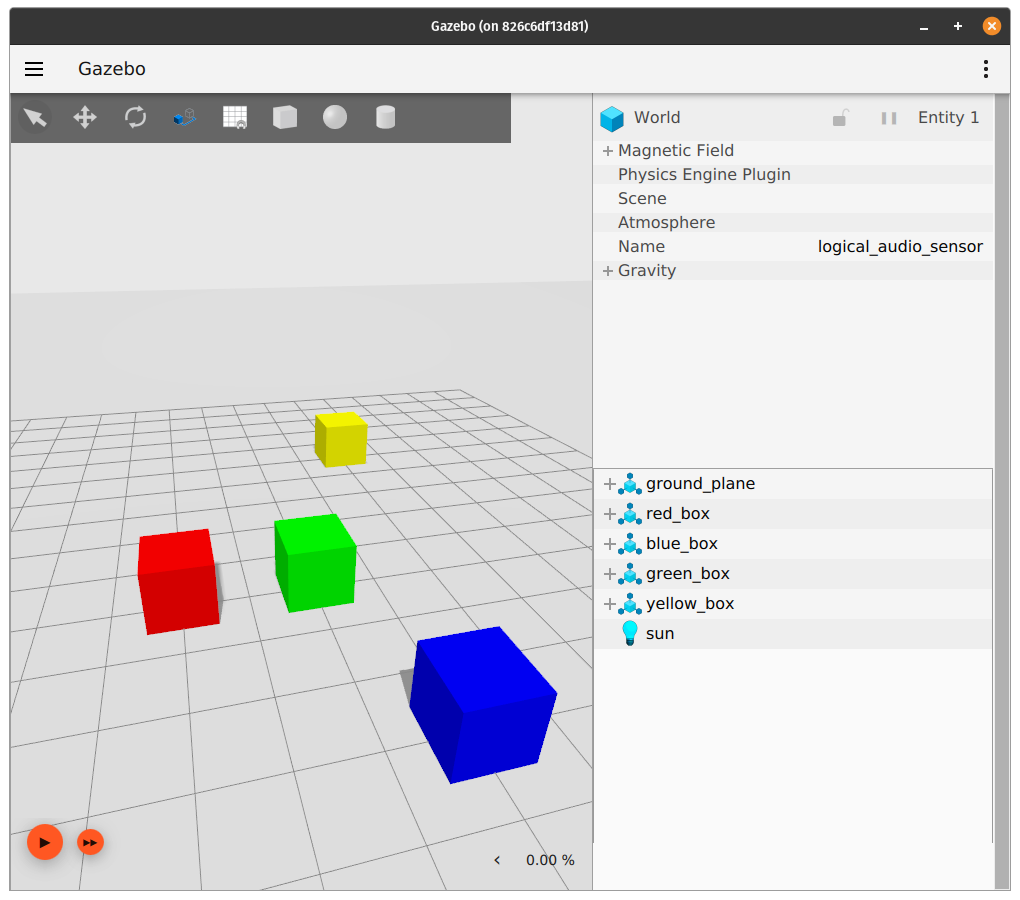
Let's take a look at logical_audio_sensor_plugin.sdf, which defines a simulation world with 4 models (in this case, boxes) that have an audio object attached to them. This world attaches logical audio sources to the red_box and blue_box models, and attaches logical microphones to the green_box and yellow_box models.
Let's take a look at the SDF relevant to the source for red_box to understand how to define a logical audio source in SDF:
As we can see, we use a <source> tag to define an audio source. An explanation of all of the tags can be found in the plugin documentation, but there are a few important things to point out:
<id>is used to identify this source when operating on it via services (services will be discussed later). Since a model can have multiple sources and microphones attached to it, each source attached to a particular model must have a unique ID. This means that no other sources attached tored_boxcan have an ID of 1, but sources attached to other models can have an ID of 1 (assuming that other models don't already have a source with an ID of 1 attached to it).- The source's pose is defined relative to the model's pose it's attached to. In this case, since the
red_boxpose is(0, 0, 0.5, 0, 0, 0)relative to the world, and the source pose is(0.5, 0, 0, 0, 0, 0)relative to thered_boxpose, the source's pose with respect to the world is(0.5, 0, 0.5, 0, 0, 0). <attenuation_function>,<attenuation_shape>,<inner_radius>, and<falloff_distance>are parameters that define the source's behavior as it travels through space. More information about how these parameters behave a source's behavior can be found here.
One other thing to note is that the source attached to the blue_box model has a <play_duration> of 0. This means that this source will play for an infinite amount of simulation time, unless it is stopped manually by the user.
Let's now take a look at the SDF relevant to the microphone for green_box to understand how to define a logical microphone in SDF:
The same rules regarding <id> and <pose> for a logical audio source also apply to a logical microphone. You can also take a look at the microphone documentation for a detailed explanation of the tags embedded in the <microphone> tag.
Testing Source and Microphone Behavior
Let's use the SDF file introduced above (logical_audio_sensor_plugin.sdf) to see how sources and microphones interact in an environment.
Start a simulation that uses this SDF file by running the following command in a terminal:
You should see a something like this:
Observing Microphone Detections
If a logical microphone can detect a source, it will publish a message to a detection topic. With the simulator still running, open a new terminal and run the following command to see which microphone detection topics are available:
You should see the following detection topics as a part of the output (the _1 suffix is the ID assigned to the microphones in the SDF):
Let's see if the microphone attached to yellow_box can hear anything. Run the following command:
You'll notice that this command produces no output. This means that this microphone cannot detect any of the sources that are currently playing.
Now, let's see if the microphone attached to green_box can hear anything. Modify the command you just ran to look like this:
You'll notice an output that looks like the following:
This means that this microphone can detect the source connected to red_box, and the volume level detected by the microphone was roughly 0.49 (0.0 being 0% volume, and 1.0 being 100% volume). Now, go ahead and start simulation by pressing the "play" icon at the bottom-left of the screen, and the detection output will now have a time stamp attached to it:
Since the source attached to red_box was defined in the SDF file using <play_duration>10</play_duration>, this means that the last message published by the green_box detection topic will have a time stamp of 10 seconds.
Starting/Stopping Audio Sources
Now that we've discussed how to observe microphone detections, let's see how we can modify the state of a logical audio source. Logical audio sources can be started/stopped manually through Gazebo services. To see which services to call in order to start/stop a service, open a new terminal and run the following command (make sure the simulator is still running):
If you look through the list of available services, you should see the following audio source services (the _1 suffix is the ID assigned to the sources in the SDF):
Let's start the source attached to blue_box. This can be done by running the following command, which calls the "play" service for the source attached to blue_box:
Now, if you look back at the terminal that is displaying the output of green_box's microphone detections, we can see that this microphone is detecting audio from blue_box's source (we see blue_box as a part of the key field):
You can also echo yellow_box's microphone detection topic, and you should see that this microphone can detect audio from blue_box's source as well.
Since the source attached to blue_box was configured with <play_duration>0</play_duration> in SDF, it won't stop playing unless we call the stop service on it. Before we call the stop service on this source, move blue_box around with the transform control tool. You'll see that once blue_box's source volume falls below a microphone's detection threshold (defined in the SDF via <volume_threshold>), messages will stop being published to the microphone's detection topic.
Let's go ahead and call the stop service to make sure that this source will stop playing. Move blue_box back towards its original position, until you see detection messages being published by the microphones attached to green_box and/or yellow_box. Now, go ahead and stop blue_box's source by running the following command:
Now, if you look at the output for either microphone topic, you'll notice that no new messages are being published, which makes sense since no audio sources are currently playing. You can also try to call the play/stop services on the source attached to the red_box. Since the red_box has a play duration of 10 seconds, the source will automatically stop playing 10 seconds (of sim time) after starting it, unless you stop it earlier by calling the stop service. One other important thing to note is that calling the play service on a source that is already playing does nothing. For example, if the source attached to red_box is already playing, and you call the play service on it, then it will not play for another 10 seconds. The source will still stop at the original 10 second duration mark. Similarly, calling the stop service on a source that is already stopped also does nothing.