This tutorial gives an introduction to Gazebo Sim's levels feature. This feature allows loading and unloading objects in simulation according to their proximity to the robot, which improves performance in simulations with large environments.
A level is a part of a world defined by a box volume and the static entities inside it. An entity can be present in more than one level, or in none of them. Levels may overlap in their volumes and may be far from each other.
Each level has a buffer zone, which is an inflation of the level's volume outside its boundaries used to detect when a performer is about to come into the level, or has left and is far enough away to exclude the entity from the level.
All simulation entities which may change levels during the simulation, such as robots, actors and dynamic models are called Performers. A performer only has meaning in the context of levels or distributed simulation.
To enable levels, it is necessary to add appropriate tags in the SDF file as described below, and to launch Gazebo with the --levels flag.
All the situations described here refer to simulation running in a single server.
- Note
- Take a look at the terminology tutorial to get familiar with concepts used in this tutorial.
Try it out
Gazebo ships with an example world that demos the levels feature. Try it as follows:
Run the example world with the
--levelsflag:gz sim levels.sdf --levelsGazebo will open with a world that has 2 vehicles, one red and one blue.
Open a new terminal and publish the following commands for the vehicles to drive forward:
gz topic -t "/model/vehicle_blue/cmd_vel" -m gz.msgs.Twist -p "linear: {x: 4.0}"and
gz topic -t "/model/vehicle_red/cmd_vel" -m gz.msgs.Twist -p "linear: {x: 2.0}"- Press play on Gazebo. You'll see that the tunnels will be loaded as the vehicles move forward.
No levels
The simplest case is a world without levels or performers. This is essentially the same as a world with a single level.
This is the situation when the world file doesn't have <level> tags or when Gazebo is launched without the --levels flag.
Multiple levels, one server
If a world has a single performer, which may be moving across several levels, only the level which contains the performer, and the default level, will be initially loaded. As the performer moves in the world, the runner will load / unload levels as needed.
- To "load" a level is to create entities and components for the models in that level.
- To "unload" a level is to remove entities and components for the models in that level.
- Systems that keep internal state will need to react appropriately to entities being added and removed.
- A level is loaded when the performer enters its buffer zone.
- A level is unloaded when the performer exits its buffer zone.
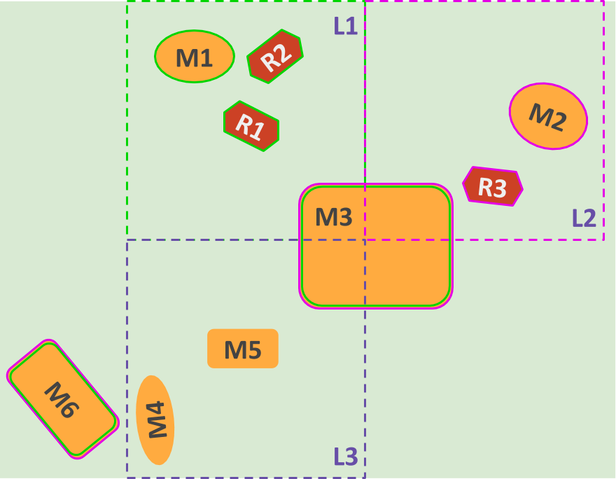
Take a look at the 2D example below. This example focuses on a single performer, but the same logic can be extended to multiple performers.
- The green area represents the area of the world which this simulation is expected to take place in.
- Each of the areas delimited by dashed purple lines is a level. There are 3 levels (
L1~L3). - The light blue area represents the buffer zone for level
L1. Zones forL2andL3have been omitted. - Each orange shape represents a static model in the world (
M1~M6) - The red shape represents the robot performer (
R1)
Entities are divided into those that belong to levels, and global entities:
M1belongs toL1, so whenL1is loaded / unloaded, entities will be created / destroyed for that model. Likewise,M2belongs toL2, andM4andM5belong toL3.M3belongs to more than one level and will be loaded as long as one of those levels is loaded.M6is not in any level, so it is treated as a global entity and is always loaded. Ideally, this kind of entity should be avoided unless there's a need for it, such as an infinite ground plane.
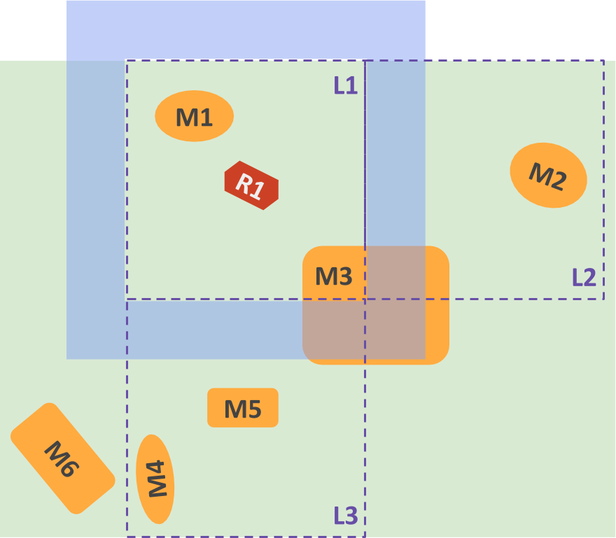
Let's take a look at how levels are loaded / unloaded as the performer moves:
Performer
R1starts inside levelL1. This means that the simulation will initially have loaded the following, which is represented by bright green lines:R1, which is the performer.M1andM3, because they belong to the level.M6, because it is global.
The performer moves south towards
L3and enters its buffer zone, triggering a load of that level's models,M4andM5. Note that at this moment, bothL1andL3are loaded.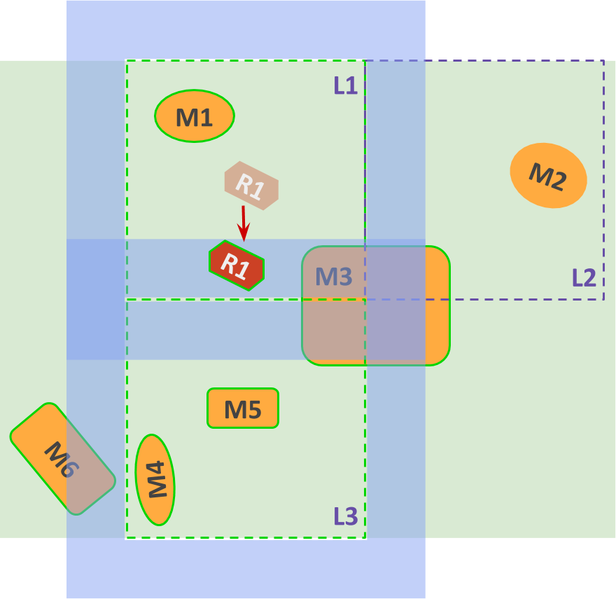
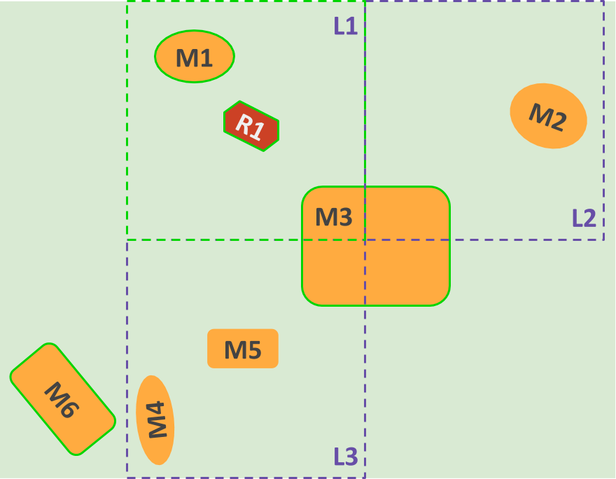
The performer moves further south, exiting
L1and enteringL3. However,L1is still loaded, sinceR1is still within its buffer zone.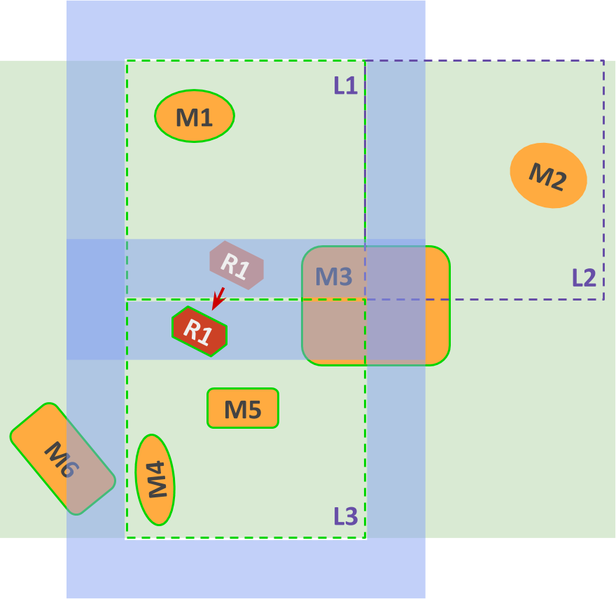
Eventually
R1moves beyondL1's buffer, triggering an unload ofL1. The main effect is unloadingM1.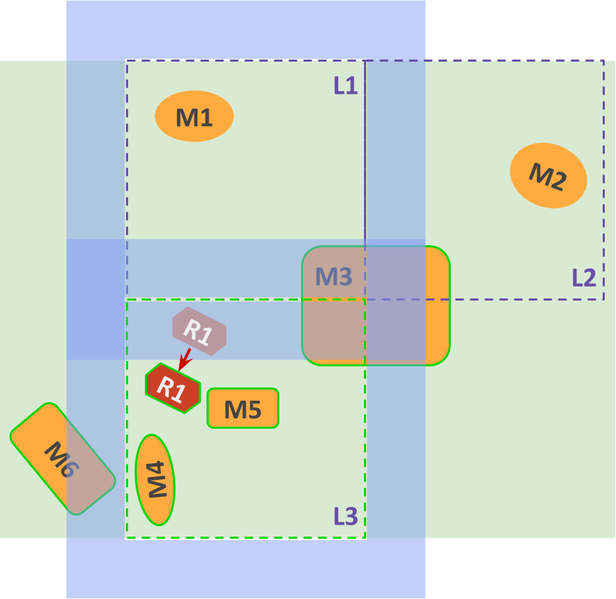
SDF elements
Two new SDF elements are introduced for distributed simulation:
<level><performer>
The concepts of levels and performers are specific to Gazebo, thus, putting them directly under the <world> tag would diminish the generality of SDF. A new tag, <extension>, has been proposed for such circumstances but has not been implemented yet. Therefore, for now, the <level> and <performer> tags will be added to a <plugin name="gz::sim" filename="dummy"> tag. The plugin name gz::sim will be fixed so that a simulation runner would know to check for that name in each plugin tag.
<level>
The <level> tag contains information about the volume occupied by the level and the entities inside the level. The volume is given by a <box> geometry (more shapes may be supported in the future) and it is used to determine whether a performer is inside the level. Currently, the box shape is internally converted into an axis aligned box to speed up intersection calculations. The position of the volume is specified with respect to the world frame using the <pose> tag. Although we are using the <pose> tag, the orientation part is ignored. The <buffer> tag is used to express the buffer zone of the volume.
Entities associated with the level are specified using the <ref> tag. The value of this tag is the name of the entity. A level can contain one or more <ref> tags. Note that it is this tag that determines whether an entity is considered to be in the level or not. That is, an entity specified by a <ref> would be considered part of a level even if its position is outside the level's volume. It is up to the user to ensure that all entities specified by the level's <ref> tags are contained within the level's volume.
Example snippet:
<performer>
- Note
- See Runtime performers, the next section, for information about specifying performers without using the SDF
<performer>tag.
The <performer> tag contains a reference to the performer entity (most likely a model). The <ref> tag designates the name of the performer entity. It is a required tag and there can only be one inside a <performer>. Multiple <performer>s cannot point to the same entity.
In addition, the <performer> tag contains information about the volume occupied by the performer. This volume is specified by the <geometry> tag. Only the <box> tag is currently supported.
- Note
- The volume for a performer may be automatically generated in future versions of Gazebo.
Example snippet:
Runtime performers
Performers can be specified at runtime using a Gazebo Transport service. This functionality can be used when a performer is not known at load time. For example, you may need to start simulation with an empty world and spawn models (performers) into simulation at a later time.
The name of the add performer service is /world/<world_name>/level/set_performer. Make sure to replace <world_name> with the name of simulated world. The service request is an gz:msgs::StringMsg message, and the response is an gz::msgs::Boolean message. The response is true when the performer was successfully added.
Example
- Run the
levels_no_performer.sdfworld in a terminal.
Here you will see the two vehicles, which are regular models that do not trigger level loading. They are not performers until you call the service.
- In another terminal call the add performer service for the blue vehicle.
Example
The following is a world file that could be an instance of the world shown in the figure