

ROS 2 integration overview#
Gazebo can be integrated within a ROS 2 system. Let’s start describing the different types of integrations that you can achieve between Gazebo and ROS.
Use ROS to launch Gazebo: ROS prescribes a specific way to launch all the pieces needed in your system. There’s a dedicated launch mechanism to orchestrate the launch of all your components and many tooling around it. Gazebo can be launched in this way.
Use ROS to interact with Gazebo topics via the
ros_gzbridge: Once Gazebo is up and running, it’s very common to communicate with the simulation. A common way to perform this communication is via topics. Gazebo has its own middleware, Gazebo Transport, that exposes a set of topics and services quite similar to ROS. Theros_gzbridge allows you to create a bridge between Gazebo and your ROS system, that translates between Gazebo Transport and ROS 2 as needed.Use ROS to spawn a Gazebo model: Gazebo worlds can include models that are loaded at startup. However, sometimes you need to spawn models at runtime. This task can be performed using ROS 2.
Requirements#
Please follow the Install Gazebo and ROS document before starting this tutorial. A working installation of ROS 2 and Gazebo is required to go further.
Important: Most of this functionality is only available in ROS 2 Rolling. We’ll backport it to ROS 2 Jazzy soon.
Composition#
If you inspect the parameters of the launch files mentioned in the next
tutorials, you’ll notice that we have included in most cases two parameters
named use_composition and create_own_container. When the use_composition
parameter is set to True, the associated ROS node will be loaded within a
ROS container. When this happens, all the nodes within the same ROS container
share the same process and can leverage intraprocess communication.
The parameter create_own_container only makes sense when use_composition is
set to True. This parameter lets you control whether you start a ROS
container for your composable nodes or you defer to an external ROS container.
Our recommendation is to always set the use_composition parameter to True
and decide if you need to create your own container based on your configuration.
Typically, if you’re only dealing with your own launch files you’ll probably set
create_own_container to True. On the other hand, if you’re using your launch
files as part of a more complex startup where a ROS container is already
present, you should set create_own_container to False and, instead, set the
parameter container_name to the existing container name.
That way, the communication between Gazebo, the bridge, and other potential ROS nodes will be intraprocess.
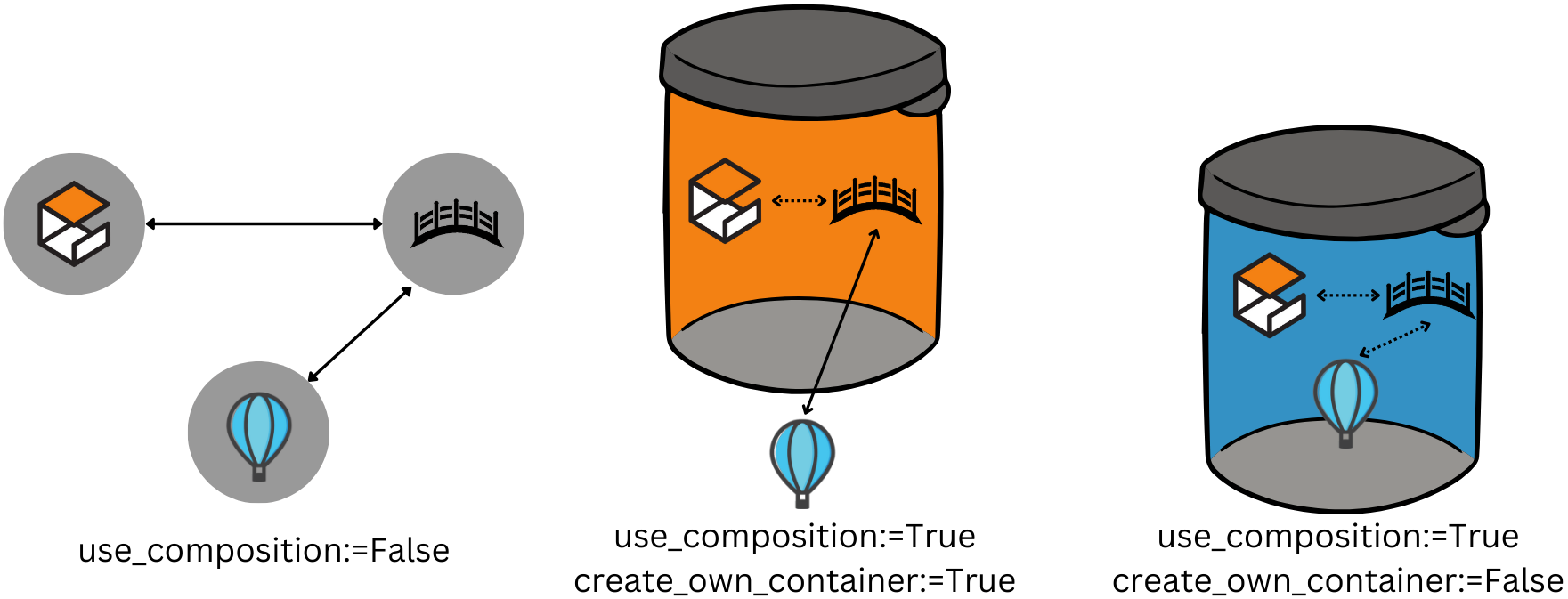
This figure illustrates the concept of composition. The left diagram captures
the idea of not using composition. All the three example nodes are standalone
nodes, and they can talk via interprocess communication using the bridge.
The center diagram represents the scenario where we can use composition with a ROS container created by a ros_gz launch file containing both Gazebo and the bridge, and an additional
consumer node outside that we cannot control. All communication between Gazebo
and the bridge is intraprocess and interprocess between the external consumer
node and the bridge.
The diagram on the right side is using composition across all nodes but the
ros_gz launch file doesn’t start its own container directly. This setup by itself will
not work until you start an external ROS container (manually or via a separate launch file). In this diagram, the external ROS consumer node starts the
container. We’re using the Nav2 logo as an example of external ROS 2 consumer
node.
You can learn more about ROS composition in this tutorial.
What’s next?#
Here are the next follow-up tutorials that you can check to learn more about Gazebo/ROS integration.